Google Classroom
GeoGebra
GeoGebra Classroom
Sign in
Search
Google Classroom
GeoGebra
GeoGebra Classroom
Outline
MMT: Synthesis of Mechanisms
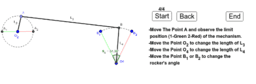
Synthesis of two angular follower's position with no quick return for a rocker's path ϴ4
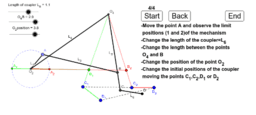
Synthesis of two angular positions with no Quick Return
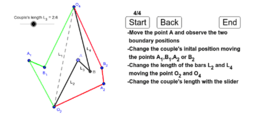
Synthesis of two positions for the coupler
Synthesis of a four bar for 3 posess
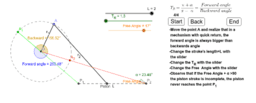
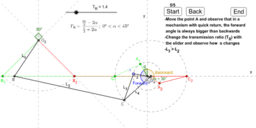
Synthesis of two angular position follower with Quick Retu
Synthesis of a slider crank with quick return
Synthesis of a Double 4-bar Quick Return
Synthesis of a 6 bar quick return slider crank
Synthesis of a Quick Return Mechanism
Synthesis of trajectory generation for 3 points in specified
Synthesis of 4 bar for 3 coupler's points
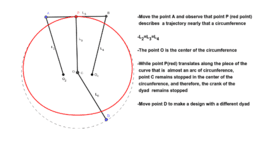
Single dwell with dyad
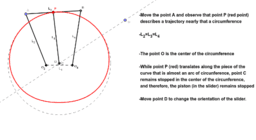
Single Dwell Mechanism with slider
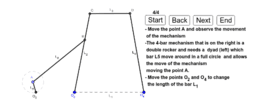
Double rocker mechanism with dyad
MMT: Synthesis of Mechanisms
Author:
Andereguillor
Synthesis of two angular follower's position with no quick return for a rocker's path ϴ4
Synthesis of two angular positions with no Quick Return
Synthesis of two positions for the coupler
Synthesis of a four bar for 3 posess
Synthesis of two angular position follower with Quick Retu
Synthesis of a slider crank with quick return
Synthesis of a Double 4-bar Quick Return
Synthesis of a 6 bar quick return slider crank
Synthesis of a Quick Return Mechanism
Synthesis of trajectory generation for 3 points in specified
Synthesis of 4 bar for 3 coupler's points
Single dwell with dyad
Single Dwell Mechanism with slider
Double rocker mechanism with dyad
Next
Synthesis of two angular follower's position with no quick return for a rocker's path ϴ4
New Resources
alg2_05_05_01_slider_practice_flvs
Icosahedron
Explore the invariant lines of matrix {{-2,5},{6,-9}}
Poorly Drawn Parallelograms 3
Exploring the Derivative of a Quadratic Function
Discover Resources
Distances to Vertices
Secant Sketch p.3
Angles around a point
Incircle of hexagon
Klokke manuell digital analog uttale
Discover Topics
Variance
Division
Inequalities
Algebra
Similarity Transformation or Similarity