Giriş yap
Ara
Bölüm taslağı
Artificial Neural Network
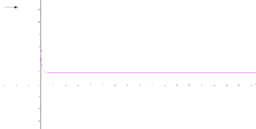
Trajectory of system: y'=ℯ^(sin(y)) - y² + ln(y)
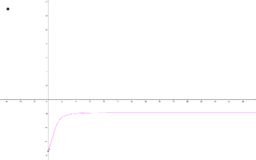
Trajectory of system: y'=sin(y)-y/2
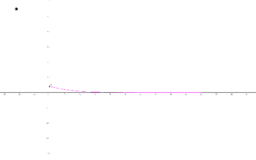
Trajectory of system: y'=y^2-y
Artificial Neural Network
Yazar:
Wu Xiao-Ren
Some examples of the trajectories of the dynamic systems
Trajectory of system: y'=ℯ^(sin(y)) - y² + ln(y)
Trajectory of system: y'=sin(y)-y/2
Trajectory of system: y'=y^2-y
Sonraki
Trajectory of system: y'=ℯ^(sin(y)) - y² + ln(y)
Yeni Kaynaklar
兩組對邊相等的四邊形
球體建築師
畫出對稱圖形
Earth with coastline
國旗 (Claude 版)
Kaynakları Keşfet
老師~這樣算另一種嗎??
棒形圖2(我最喜愛的科目)
ghseh 二次函數左右x值差
極落戰艦-初階版
二倍角公式證明
Konuları Keşfet
Parametrik Eğriler
Alan
Yansıma
Küp
Doğal Sayılar