Following a polygon line
Programming hints
Use the optical ground sensor to detect the inside or outside border of the polygon line. Try to keep the sensor at 50% reflected light intensity and use a proportional error signal to adapt the turning angle of the robot while slowly advancing.
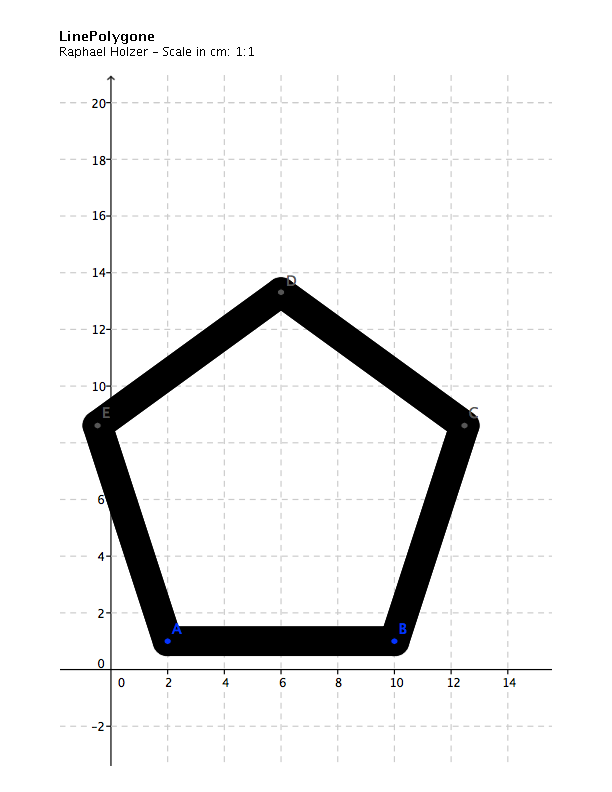
Preview of the printed A4 sheet