Google Classroom
Google Classroom
GeoGebra
Classe GeoGebra
Se connecter
Chercher
Google Classroom
Google Classroom
GeoGebra
Classe GeoGebra
Contenu
MMT: Synthesis of Mechanisms
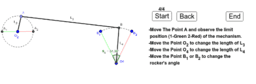
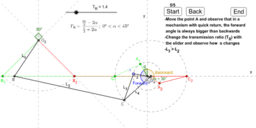
Synthesis of two angular follower's position with no quick return for a rocker's path ϴ4
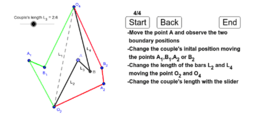
Synthesis of two angular positions with no Quick Return
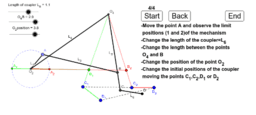
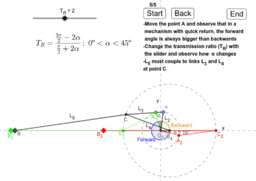
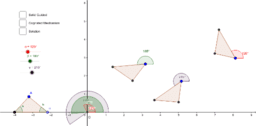
Synthesis of two positions for the coupler
Synthesis of a four bar for 3 posess
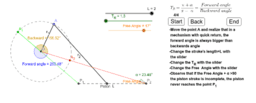
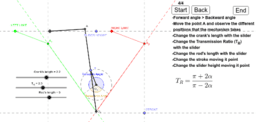
Synthesis of two angular position follower with Quick Retu
Synthesis of a slider crank with quick return
Synthesis of a Double 4-bar Quick Return
Synthesis of a 6 bar quick return slider crank
Synthesis of a Quick Return Mechanism
Synthesis of trajectory generation for 3 points in specified
Synthesis of 4 bar for 3 coupler's points
Single dwell with dyad
Single Dwell Mechanism with slider
Double rocker mechanism with dyad
MMT: Synthesis of Mechanisms
Auteur :
Andereguillor
Synthesis of two angular follower's position with no quick return for a rocker's path ϴ4
Synthesis of two angular positions with no Quick Return
Synthesis of two positions for the coupler
Synthesis of a four bar for 3 posess
Synthesis of two angular position follower with Quick Retu
Synthesis of a slider crank with quick return
Synthesis of a Double 4-bar Quick Return
Synthesis of a 6 bar quick return slider crank
Synthesis of a Quick Return Mechanism
Synthesis of trajectory generation for 3 points in specified
Synthesis of 4 bar for 3 coupler's points
Single dwell with dyad
Single Dwell Mechanism with slider
Double rocker mechanism with dyad
Suivant
Synthesis of two angular follower's position with no quick return for a rocker's path ϴ4
Nouvelles ressources
Slope and Road Signs
seo tool
Trefoil Knot
z`]]
רישום חופשי
Découvrir des ressources
CCSS IP Math I Unit 2 Lesson 3
Unit 11 Test
Figure 16.5a Competitive external market
Faye_G2_Translations
Transformation 2019 bil 3
Découvrir des Thèmes
Nombres Complexes
Surface
Régression Linéaire
Triangles
Division