An Extended Interpretation of the Concept of point estimators of location (geometric medians and geometric centers) in bounded closed domains for a discrete set of points from ℝ³
There is a system of n points in a certain region. For the "average overall" characteristic of such a system, point estimates are usually used: the geometric median and the geometric center (or center of mass, the centroid of a finite set of n points). In the first case, it is a point that minimizes the function of the sum of the distances between itself and each point in the set (for three points - Fermat point), and the sum of the squares of this distances -in the second case.
I propose a more extended interpretation of the concept of point estimates of the location (geometric medians and geometric centers) of a discrete set of n points not in the entire domain e.g. ℝ³, but in some domain. That is, you need to find points in this domain that extremize the sum of the distances function from them to n points of the set.
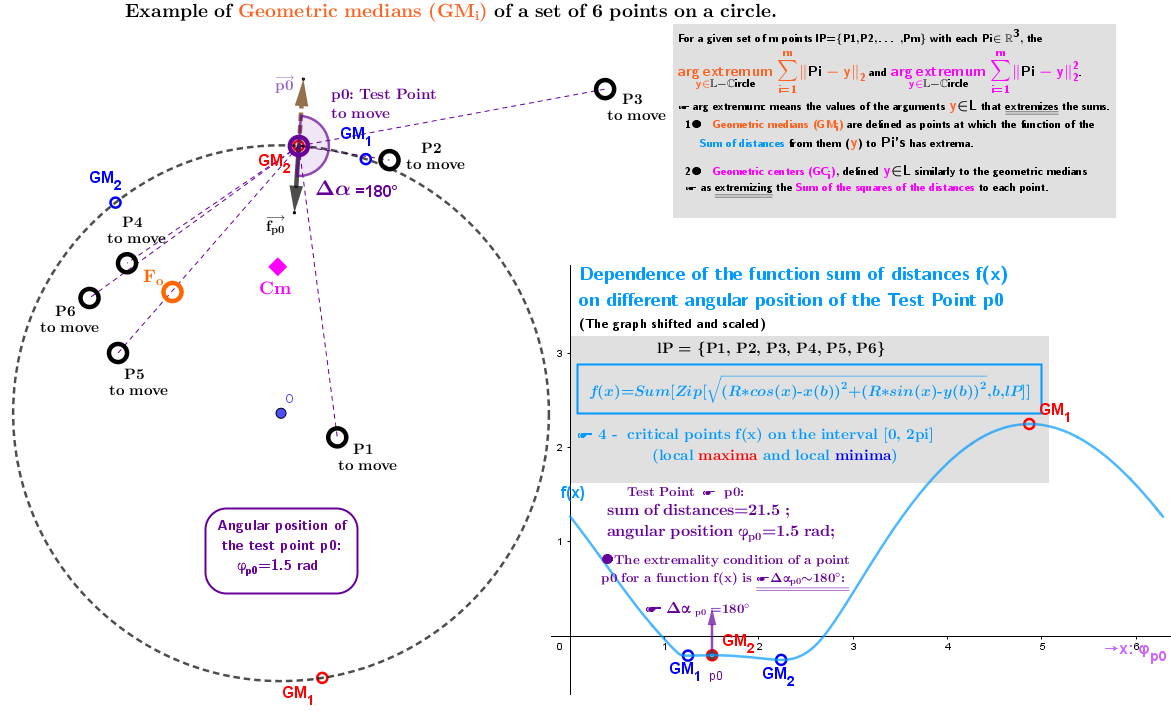
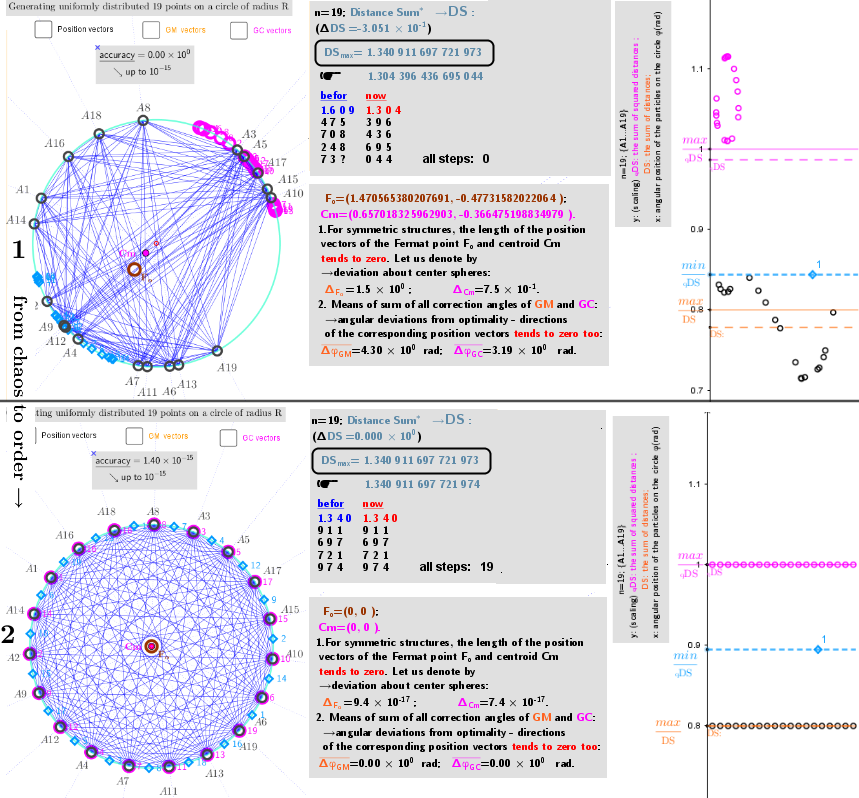
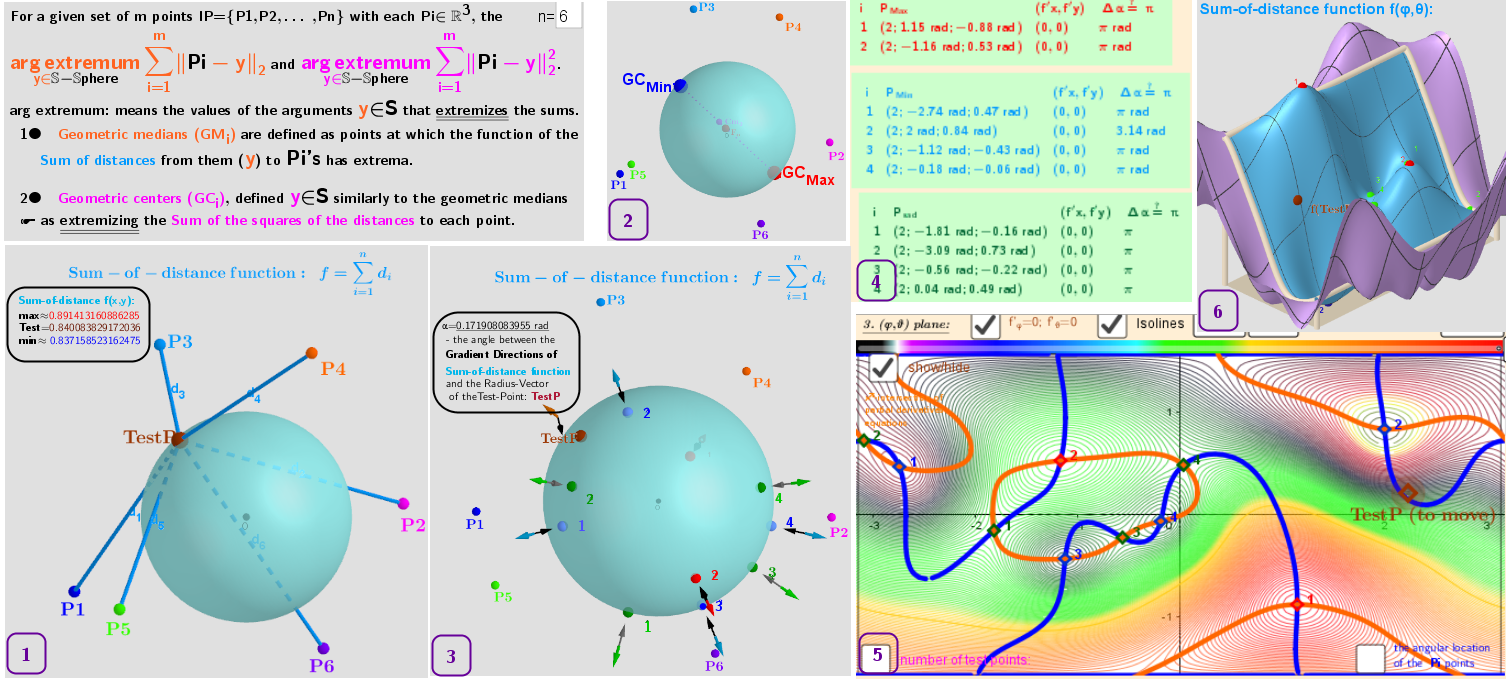
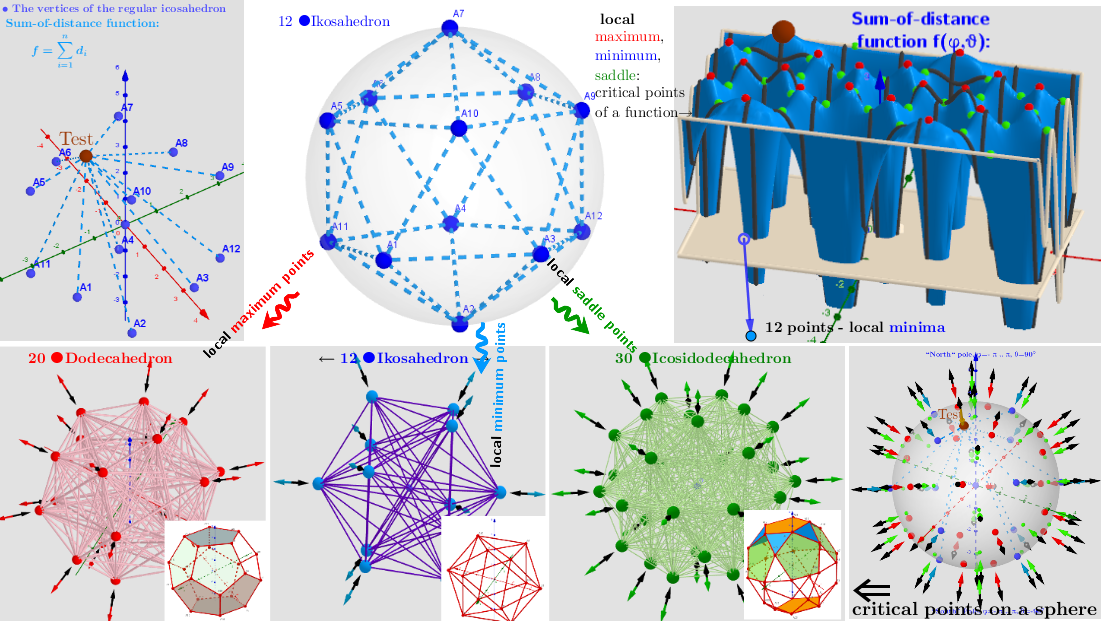
In applets, a limited number of particles from ℝ³ are considered, and a circle and a sphere are considered as such a domain, i.e. point estimates are sought on a circle / sphere. The search for point estimates on a circle allows you to understand their meaning more clearly . Thus, the search for point estimates is reduced to finding the critical points of the distance sum function f (x, y, z) subject to a constraining equation g(x,y)=x²+y -R² in the case of estimation on a circle or g(x,y,z)=x²+y²+z²-R²-in the case of estimation on the sphere. The problem is solved using Lagrange multipliers. There is a system of equations: ∇f(x,y,z)= λ∇g(x,y,z). A local optimum occurs when ∇f(x,y,z) and ∇g(x,y,z) are parallel, and so ∇f is some multiple of ∇g.
Algorithms are proposed for finding points corresponding to extremes: minima, maxima, and, in the case of the sphere, also saddle points of the sum of distances function.
Key points in images. Examples of point estimators of location (geometric medians and geometric centers) in bounded closed domains for a discrete set of points from ℝ³
1. Point estimators (geometric median and geometric center) defined for a discrete set of points from ℝ³
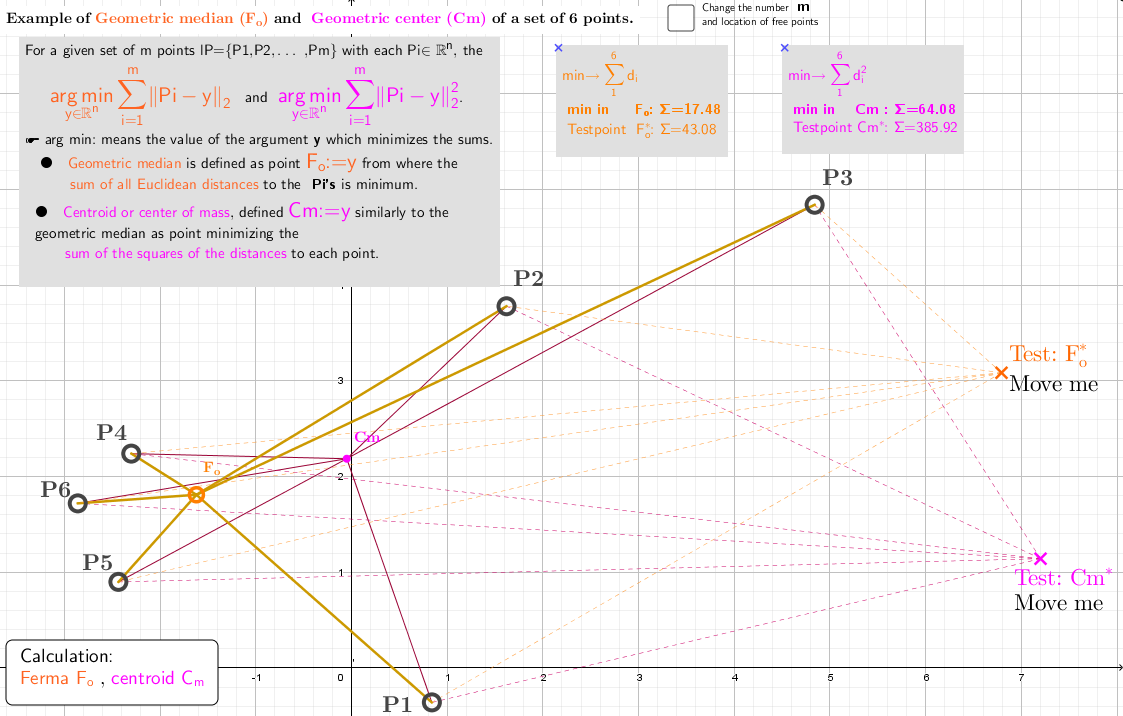
The geometric median of a discrete set of sample points in a Euclidean space is the Point minimizing the sum of distances(di) to the sample points. For triangles, this point is called the Fermat point.
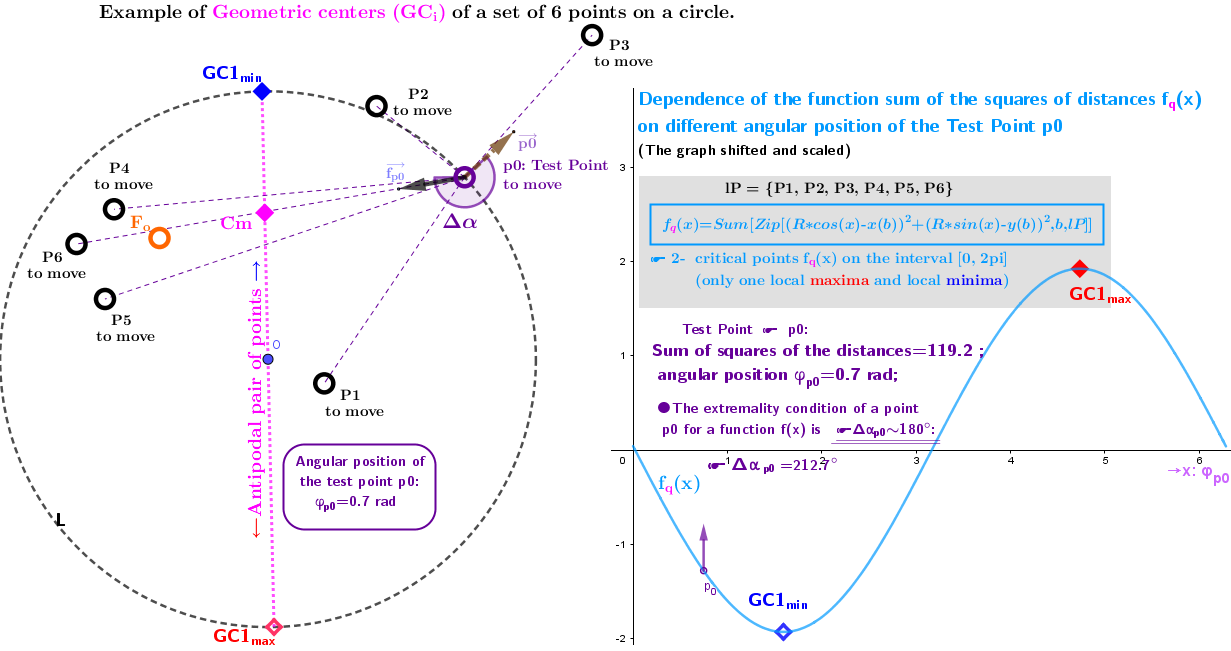
The geometric center of a discrete set of sample points in a Euclidean space is the Point minimizing the sum of the squares of the distances(di2) to the sample points, can be found by a simple formula — its coordinates are the averages of the coordinates of the points. It is also known as the centroid, center of mass of a finite set of points.
Example 1.1
2. Point estimators of location (geometric medians and geometric centers) defined in bounded closed domain: on a circle for a discrete set of points from ℝ³
Example 2.1a
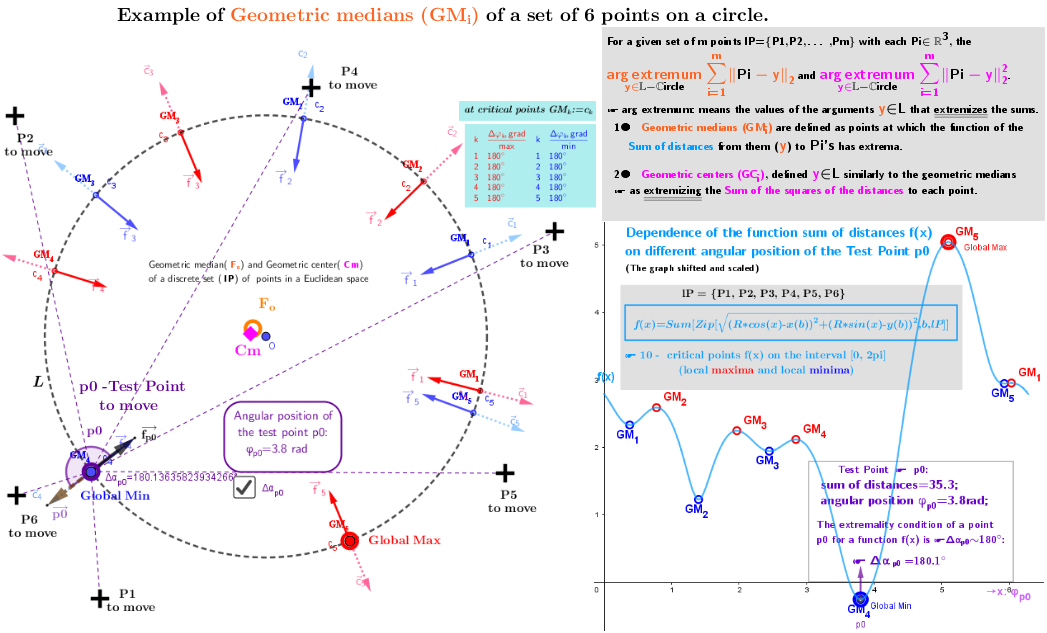
Example 2.1b
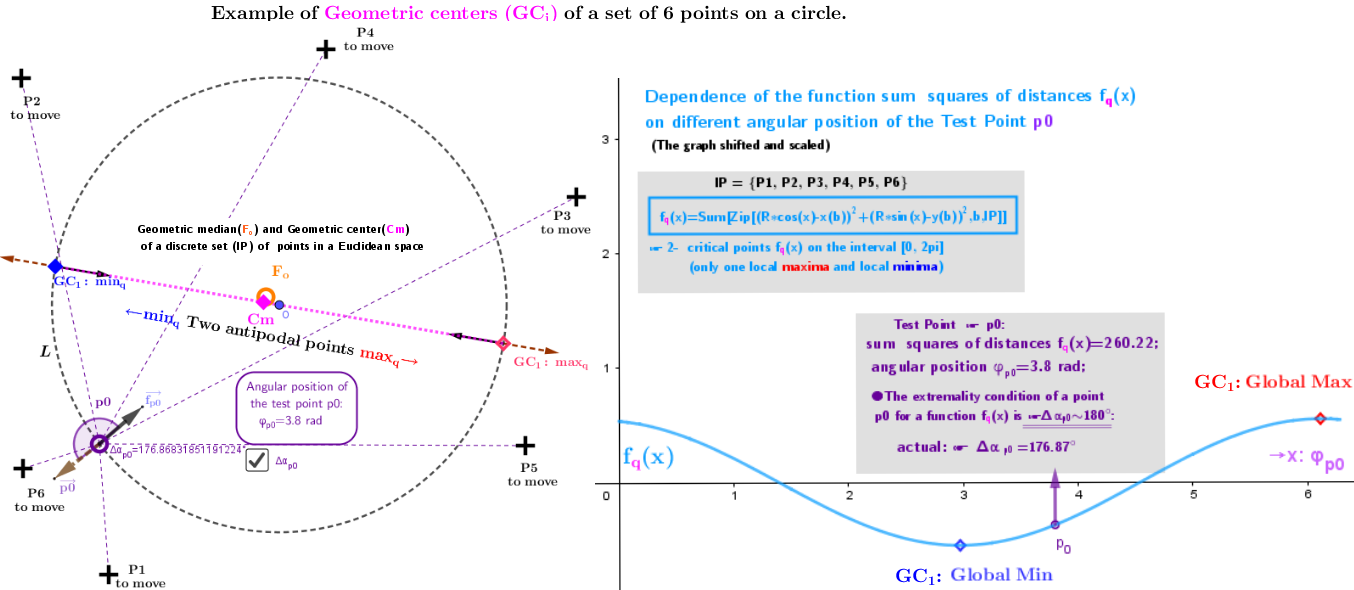
Example 2.2a
Example 2.2b
Example 2.3
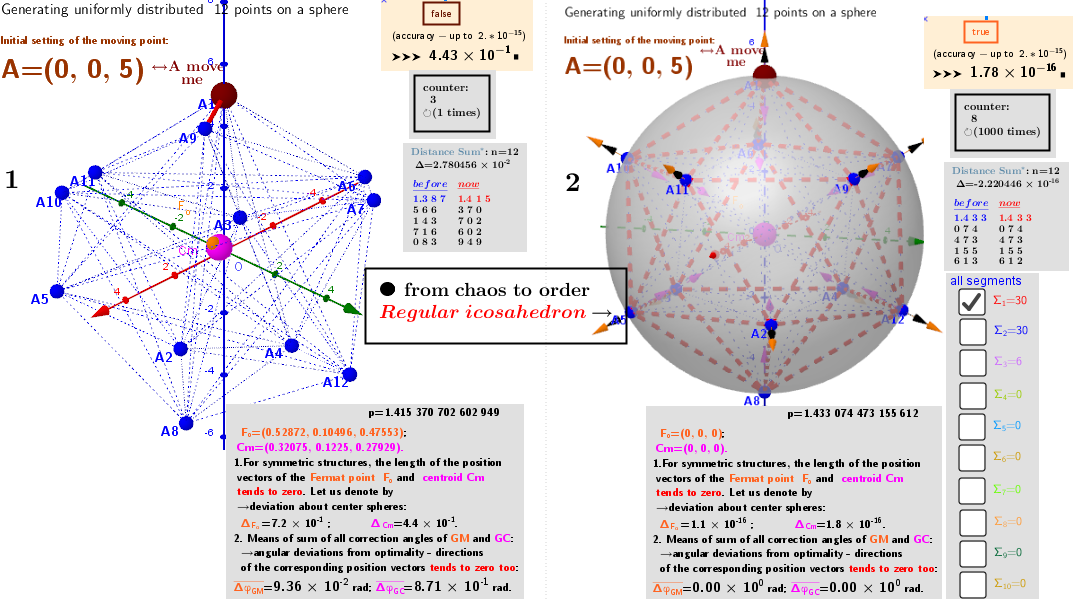
3. Point estimators of location (geometric medians and geometric centers) defined in bounded closed domain: on a sphere for a discrete set of points from ℝ³
Example 3.1
Example 3.2
Example 3.3