Field oriented control of a doubly fed slip-ring asynchronous machine
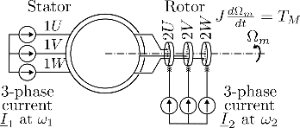
In this animation the stator and rotor (three phase symmetrical windings, phase width , terminals 1U, 1V and 1W & 2U, 2V and 2W respectively) are fed by a three phase current. The machine is field oriented at all times which allows the rotor speed to be dynamically controlled by controlling the rotor torque (through the torque producing component of the stator current ). The instantaneous stator currents (, and ) phase and amplitude follow from: (1) the rotor angle, (2) the instantaneous phase of the rotor currents (3) the setting of the torque producing component of the stator current, and (4) the setting of the flux producing component of the stator current. is assumed (load torque is zero) so that the rotor accelerates/decelerates according to the applied electromechanical torque (i.e. dynamic conditions are animated). Equations of motion were implemented as shown in 'Geogebra Physics Simulation - Tutorial' by Kornél Rokolya (Youtube).
See also https://www.geogebra.org/m/k5sfadmp for further explanations.
Please download the .ggb file and open with the Geogebra Classic 5 application (see https://www.geogebra.org/download) if the animation is too slow in your browser. The animation is designed to be opened on a 1080p screen and with "Make everything bigger" setting of Windows set to 100% (Change the size of text in Windows - Microsoft Support).